
Accueil > Technique > RadioTaranis
Dernière mise à jour : le 18 Juin 2021
Utilisation des récepteurs SxR
Stabilisation et pilote Automatique
Nouveau le 18 juin 2021 : mise en oeuvre sur un planeur de voltige d'energure 4m de type AIR100
Nouveau le 16 juin 2020 : plus de détails sur les 2 modes du Script S6R.lua
Bonne nouvelle le 15 Aout 2020 : un nouveau firmware compatible avec le module RF en version 2.1.0 est sorti pour les récepteurs S6R et S8R :
Voir la doc sur le firmware RF 2.1.0
Les récepteurs de la série SxR (S6R et S8R) ont la particularité d'intégrer un gyro et un accéléromètre sur les 3 axes !
L'objectif de ce tuto est de préciser la mise en oeuvre de ces récepteurs en partant de besoins d'utilisation sur des modèles très différents :
- Avion de début, phase d'apprentissage :
- stabilisation horizontale :
- validation avec l'inter SC en position haute
- pour un vol lissé
- pour se passer de la dérive
- pour contrer ls effets du vent par exemple à l'atterissage avec un vent de travers
- la réglage du gain (S1) ne joue que sur la dérive
- mode pilotage automatique, très interessant pour débuter :
- validation avec l'inter SC en position basse
- si on ne sait plus dans quelle position se trouve l'avion, mode panique
- l'avion se remet à plat même s'il était sur le dos ou sur la tranche !
- le mode pilotage automatique se désactive dès qu'on bouge le manche des ailerons
- remettre SC en position centrale pour permettre à nouveau le mode panique
- Avion de voltige de type "Voltigeur HobbyKing" (voir la programmation) :
- stabilisation horizontale :
- validation avec l'inter SC en position haute
- pour contrer ls effets du vent par exemple à l'atterissage avec un vent de travers
- la réglage du gain (S1) ne joue que sur la dérive
- mode pilotage automatique :
- validation avec l'inter SC en position basse
- si on ne sait plus dans quelle position se trouve l'avion après une voltige débridée, mode panique
- le mode pilotage automatique se désavtive dès qu'on bouge le manche des ailerons
- remettre SC en position centrale pour permettre à nouveau le mode panique
- stabilisation verticale (mode Torque) :
- validation avec l'inter SC en postion haute et l'inter SD en position basse
- stabilisation verticale automatique du modèle, juste les gaz à gérer
- pas de rotation si on règle le gain au max
- torque-roll si on diminue le gain et qu'on le travaille aux ailerons
- le réglage du gain (S1) ne joue que sur les ailerons
- pour la tenue bien verticale du Voltigeur en mode Torque-Roll, relancer le script S6R.lua et ajuster l'offset angle vertical PRF
- Moto-planeur électrique ( très interessant pour les grands planeurs) (voir la programmation) :
- stabilisation horizontale :
- validation avec l'inter SC en position haute
- pour contrer ls effets du vent par exemple à l'atterissage avec un vent de travers
- pour rester dans la pompe, à tester ...
- la réglage du gain (S1) ne joue que sur la dérive
- mode pilotage automatique pour le lancement du modèle, c'est le besoin principal :
- validation au sol avec l'inter SC en position basse
- le planeur est lancé comme on peut avec un moteur capable quand même de bien le tirer
- le pilote automatique le maintient dans la position choisie, ailes à l'horizontale et lègérement à cabrer
- le mode pilotage automatique se désactive dès qu'on bouge le manche des ailerons
- pas de possibilité de pilote automatique pendant le vol si on ne remet pas SC au centre
- SC au centre, si on ne sait plus dans quelle position se trouve la planeur, mode panique en mettant SC en position basse
- si le fuselage est difficile à tenir et:ou que le moteur tire très fort :
- réduction automatiquement du moteur en mode pilote automatique
- pleine puissance du moteur dès qu'on reprend le manches
Test en vol le 3 septembre 2019 sur le Cumulus , planeur de chez MCM (Michel Clavier Modélisme) d'envergure 3,80m :
le récepteur S8R est installé verticalement sur le flanc du fuselage :



- test des débattements et des sens de débattement avant le 1er vol , voir vidéo
- premier vol avec un aide pour le lancer, taux de montée trop faible : voir vidéo 1er lancé
- execution du fichier SxR.lua et modification du paramètre offset profondeur : 10° : voir vidéo
- second vol , taux de montée encore top faible : voir vidéo 2eme lancé
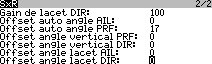
- execution du fichier SxR.lua et modification du paramètre 'offset auto angle PRF' : 17°

- troisième vol , taux de montée idéal par rapport à la puissance moteur, ça vole tout seul !... : voir vidéo 3eme lancé
- premier vol en solo : voir vidéo 1er lancé solo et second lancé solo , ça vole tout seul !... : voir vidéo second lancé solo
- pour reprendre la main, il suffit de bouger le manche des ailerons et ça vole comme avant sans le stabilisateur :



- Planeur pur en vol de pente ( très interessant pour les planeurs de 4m ou plus d'envergure) (voir la programmation) :
Test sur un planeur de voltige d'envergure 4m : l'AIR100, voir la config des inters et servos et télécharger le fichier binaire

Le gros intérêt est de pouvoir lancer seul son modèle avec le mode pilotage automatique :
- mise en route du modèle et test des débattements, inter SD en position milieu
- validation au sol du pilote auto avec l'inter SD en position basse, ne plus toucher aux manches
- test du pilote auto : les gouvernes répondent en fonction de la position en roulis et tangage du modèle
- maintient et lancer du planeur à 2 mains si le fuselage est difficile à tenir et que ça souffle fort
- on a le temps pour remettre les mains sur les manches ou pire de les rentrer dans les manchons chauffants !...
- dès qu'on touche le manche des ailerons, le pilote se désactive sans avoir besoin de remettre l'inter SD en position milieu
- Attention, il est toujours nécessaire de lancer fort et de courrir si le vent est trop faible !
Je suis parti des excellents Tutos de Jean-Claude pour mettre en oeuvre les récepteurs SxR :
- un autre tuto intéressant : http://frskytaranis.forumactif.org/t4267-tuto-recepteur-s6r
- manuel version francaise et tutos en vidéo : http://frskytaranis.forumactif.org/t1839-mega-tuto-liste-de-tous-les-liens-utiles
- télécharger sur le site FrSky pour le S6R : le manuel, le firmware, un dossier BMP et 2 fichiers LUA
- nécessité d'utiliser une version de firmware et de Companion supérieure ou égale à 2.2 :
- charger Companion 2.2x
- bien définir le profil avec le type de radio, les options de configuation (lua ...)
- télécharger le firmware de l'émetteur sur le PC ou sur la carte SD (icone téléchargement)
- télécharger le pack SD pour mettre à jour la carte SD avec le nouveau firmware
- ajouter les sons spécifiques au SxR
- mise à jour du SxR :
- cable entre la radio et la prise SPort du S6R : en direct si radio X7 ou avec un cable spécifique sir radio X9D
- allumage de la radio
- menuLONG Page 2, FIRMWARE : fichier S6R_FCC_20190531.frk (NON-EU) ou S6R_LBT_20190531.frk (EU-LBT)
- flasher module externe (3mn)
- éteindre la radio et déconnecter le S6R
- Bind du S6R : mode D16, voies 1 à 12
- Programmation des voies 1 à 8 :
- voie 1 : aileron (ou aileron gauche)
- voie 2 : profondeur
- voie 3 : moteur
- voie 4 : dérive
- voie 5 : aileron droit (ou pas utilisée)
- voie 6 : profondeur droite (ou pas utilisée)
- voie 7 : S8R : libre sans action du gyro
- voie 8 : S8R : libre sans action du gyro
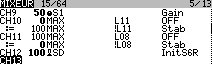
Programmation des voies 9, 10, 11 et 12 :
- donner des noms aux voies : Gain(9), Stab(10) et PilA(11)
- paramétrer des sons pour chacun des modes
- mode OFF : voie10=0 quel que soit la voie11
- mode stabilisé : voie10=100 et voie11=0
- remise pilote auto: voie10=100 et voie11=100
- mode torque-roll : voie10=100 et voie11=-100
- mode tranche : voie10=-100 et voie11=0
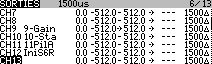
voie9 : gain du gyro : 0 Ã 100 (Ratio=+50%, décalage=50% pour utiliser toute la course du potar S1)
voie12 : initialisation du S6R, à faire une seule fois pour que le S6R mémorise les débattements : passer 3 fois la voie 12 à 0 en moins de 2 secondes. A utiliser avec précaution uniquement au sol, préférer le bouton F/S sur le S6R
Utiliser la radio pour étalonner et calibrer le S6R :
- scripts LUA dans le dossier FIRMWARE de la carte SD : S6R.lua et S6R_calibrate.lua
Script S6R.lua (dans dossier Firmware de la carte SD):
avant montage dans le modèle, sur la table :
- choix de la position de montage sur le modèle
- configuration perdue lors du bind
- en francais si téléchargé sur le forum francais
- dérouler le script et paramétrer rapidement le S6R : exemple avec le CUMULUS et le mode Rapide (Quick) dévalidé :
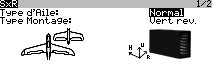

dans le cas du Cumulus, le planeur est posé sur une table, les ailes calées à l'horizontale et la valeur de l'offset (17°) permet d'ajuster ensuite l'angle de montée.
Nouveau : Script S6R.lua : Régis vous donne plus de détails :
Après avoir lancé le script « FRSKY SxR » 2 options d’assistance sont possibles.
Le choix se fait en page 2 du script sur la ligne « Quick Mode »
Chacun des 2 modes est défini ci-après :
Option 1 : Quick mode Activé (Permet les 3 modes d’assistance suivants : OFF, Stabilisation, Remise à plat (pilote auto))
Programmation des voies 9, 10, et 12 (Pas besoin de la voie 11) :
- donner des noms aux voies : Gain(9), Stab(10)
- paramétrer des sons pour chacun des modes
- mode OFF : voie10=100
- mode stabilisé : voie10=0
- remise pilote auto: voie10=-100
voie9 : gain du gyro : 0 Ã 100 (Ratio=+50%, décalage=50% pour utiliser toute la course du potar S1)
Gain du gyro= 0 è Pas de stabilisation
voie12 : initialisation du S6R, à faire une seule fois pour que le S6R mémorise les débattements : passer 3 fois la voie 12 à 0 en moins de 2 secondes. A utiliser avec précaution uniquement au sol, préférer le bouton F/S sur le S6R
Option 2 : Quick mode Désactivé (Permet les 5 modes d’assistance suivants : OFF, Stabilisation, Remise à plat (pilote auto), Torque-roll, Vol tranche)
Programmation des voies 9, 10, 11 et 12 :
- donner des noms aux voies : Gain(9), Stab(10) et PilA(11)
- paramétrer des sons pour chacun des modes
- mode OFF : voie10=0 quel que soit la voie11
- mode stabilisé : voie10=100 et voie11=0
- remise pilote auto: voie10=100 et voie11=100
- mode torque-roll : voie10=100 et voie11=-100
- mode tranche : voie10=-100 et voie11=0
voie9 : gain du gyro : 0 Ã 100 (Ratio=+50%, décalage=50% pour utiliser toute la course du potar S1)
Gain du gyro= 0 è Pas de stabilisation
voie12 : initialisation du S6R, à faire une seule fois pour que le S6R mémorise les débattements : passer 3 fois la voie 12 à 0 en moins de 2 secondes. A utiliser avec précaution uniquement au sol, préférer le bouton F/S sur le S6R
Script S6R_calibrate.lua :
- sur la table, sans servo connecté
- tourner le S6R comme indiqué à chaque étape
- appuyer sur le S6R puis taper sur Entrée
- Led jaune clignote
- attendre la fin du clignotement
- s'assurer qu'on se trouve dans la tolérance entre 0,9 et 1,1
Tester le mouvement des servos en fonction du mouvement du S6R
Si Pb relancer le script S6R.lus et règler les voies et les sens de compensation
Monter le S6R dans le modèle, et paramétrer le modèle sans s'occuper du pilote automatique
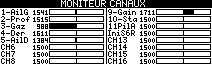
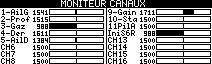
Réaliser l'Auto-Contrôle au sol pour définir les positions à zéro des ailes et du fuso et les débattemets maxi:
- positionner le modèle dans la position normale de vol que l'on souhaite
- mode gyro OFF
- inter en position grand débattement (profondeur, ailerons et dérive)
- tous les manches doivent être au neutre, le manche de gaz doit être en position basse, voie 3=-100% même si elle n'est pas utilisée (planeur pur) !
- appuyer sur F/S : ou utilisez la voie 12 (exemple basculer l'inter SD 3 fois à 0 en moins de 3 secondes) :
| page mixeur : | page sorties : | SD au cente : voie12=0 | SD en haut : voie12=-100 |
 |
 |
 |
 |
- la led bleu s'allume puis les servos bougent
- extinction led bleue : mettre en butée tous les manches sauf gaz => mémorisation des débattements maxi
- couper l'alim du S6R
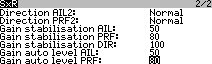
Ajuster les réglages en relancant le script S6R.lua :
- règler le gain : faible pour le premier vol
- modifier l'offset auto angle PRF pour obtenir l'angle d'icidence souhaitée
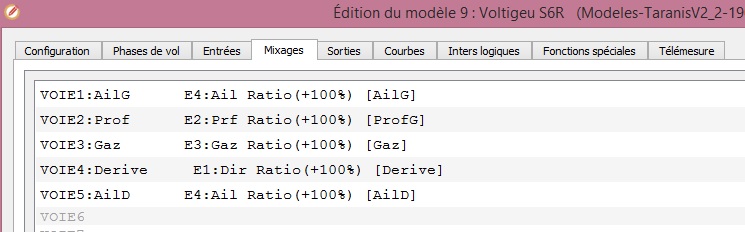
EXEMPLE : Avion de voltige de type "Voltigeur HobbyKing" : télécharger le binaire
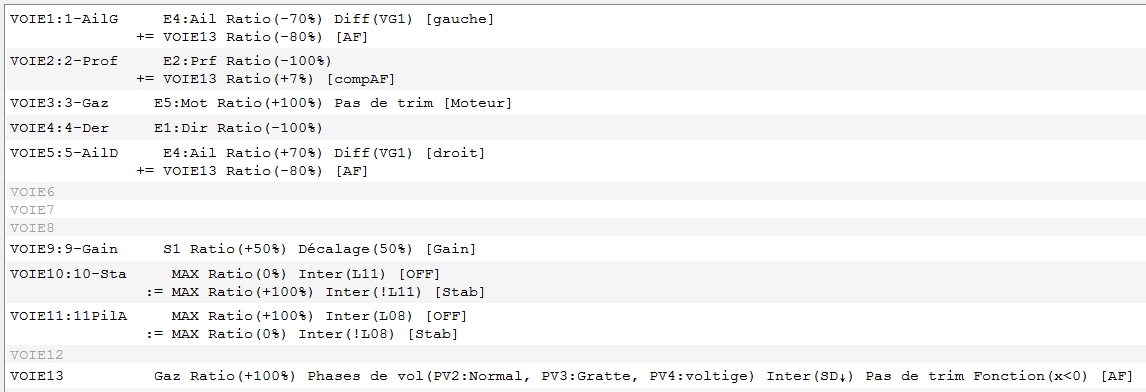
définition des voies 1 à 5 :
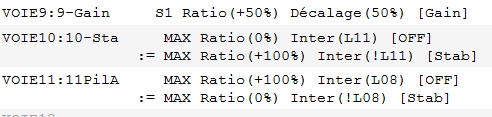
Programmation des voies 9 à 11 pour le SxR :
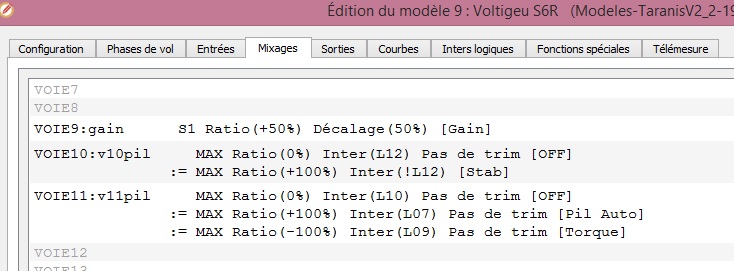
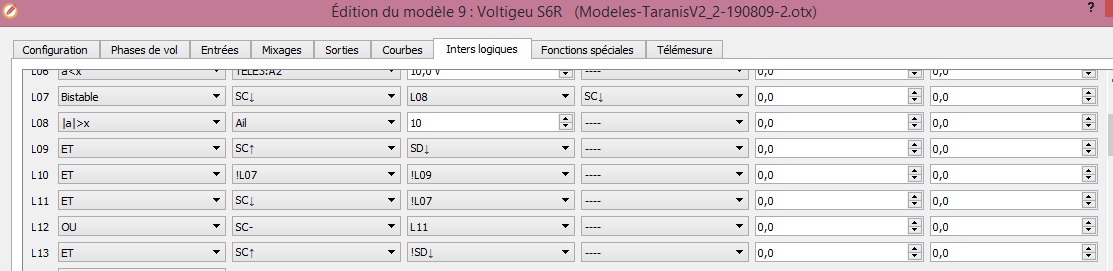
Définition des inters logiques pour le SxR :
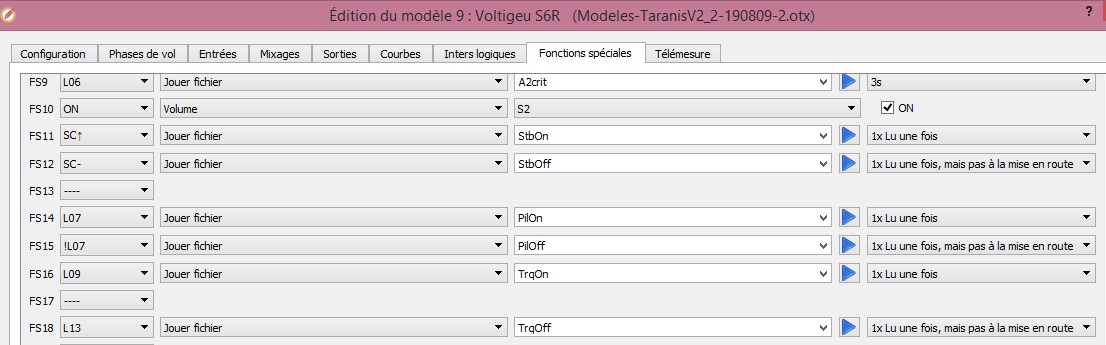
Définition des fonctions spéciales pour le SxR :
pour la tenue bien verticale du Voltigeur en mode Torque-Roll, relancer le script S6R.lua et ajuster l'offset angle vertical PRF
EXEMPLE : Moto-Planeur électrique de type "Cumulus MCM" d'envergure 4m : télécharger le binaire
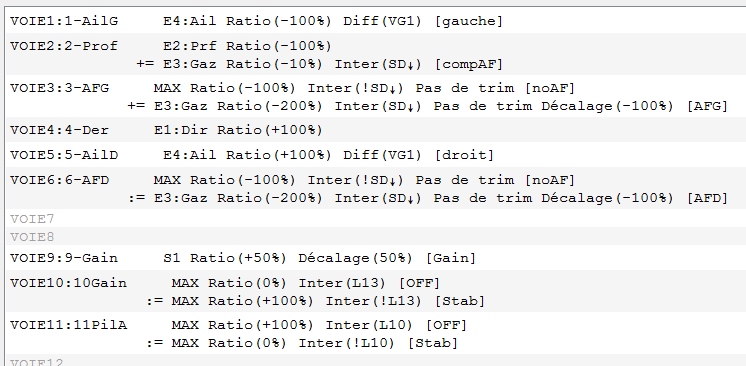
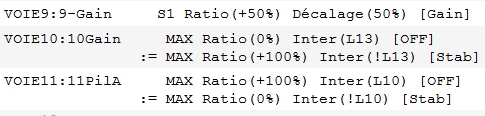
définition des voies 1 à 5 et 9 à 11 :
Définition des inters logiques pour le SxR :

Définition des fonctions spéciales pour le SxR :

EXEMPLE : Planeur de voltige pour le vol de pente de type "Fox" d'envergure 3,5m : télécharger le binaire
définition des voies 1 à 5 et 9 à 11 :
Définition des inters logiques pour le SxR :

Définition des fonctions spéciales pour le SxR :
