Adaptateur pour 2 Servos
L'As2pic permet de définir une courbe de déplacement dun servo en 2, 3, 4 ou 5 points. Il analyse la largeur dimpulsion du signal dentrée (servo 1) pour créer la largeur dimpulsion du signal de sortie (servo 2). Il peut être utilisé dans les cas suivant :
L'As2pic utilise 2 à 5 points mémorisés en EEPROM interne pour définir la largeur de limpulsion du servo 2. La fréquence de limpulsion est quant à elle, la même que celle du signal dentrée (servo 1).
Les points sont classés en EEPROM par ordre croissant de largeur dimpulsion du servo 1.
Si limpulsion dentrée est inférieure ou égale à celle correspondante au premier point, limpulsion de sortie prend la valeur programmée correspondante au premier point. De même, si limpulsion dentrée est supérieure ou égale à celle correspondante au dernier point, limpulsion de sortie prend la valeur programmée correspondante au dernier point
2 à 5 points peuvent être définis par programmation.
Pour toute impulsion de largeur comprise entre celle du premier point et celle du dernier point, le logiciel analyse sa largeur par rapport à celle du 2ème, du 3ème ou du 4ème point, pour définir de facon linéaire la largeur de limpulsion de sortie. Par exemple, si la largeur de limpulsion dentrée est comprise entre celle du 2ème et du 3ème point, la largeur de limpulsion de sortie est égale à :
L2 = L2P2 + ((L2P3-L2P2) x (L1-L1P2)/(L1P3-L1P2))
Schéma de principe :
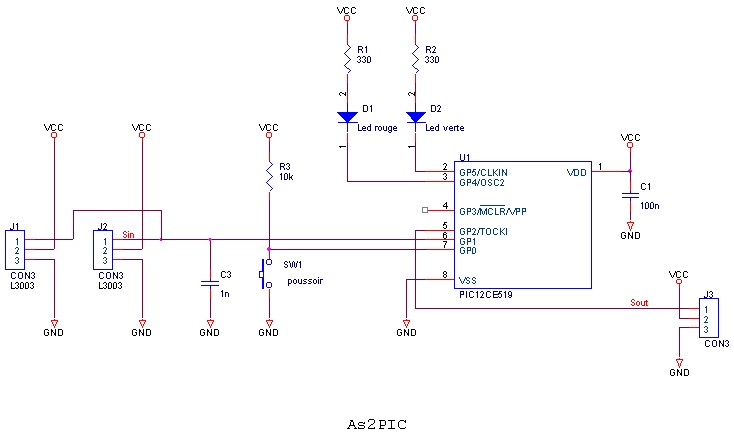
Le micro-contrôleur Pic12CE519-04/SM(version CMS) doit être au préalable programmé avec le fichier binaire As2pic.hex
L'As2pic est câblé sur un circuit imprimé simple face d'épaisseur 1,6mm ou mieux 0,8 mm.
Description de la réalisation :
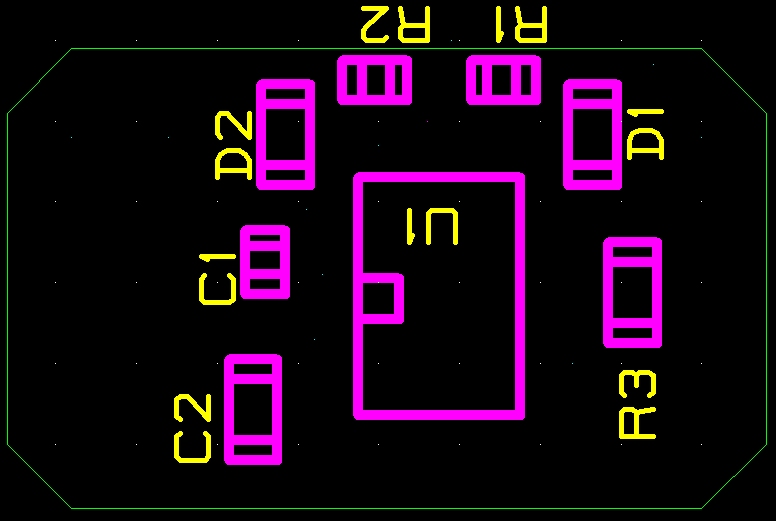
| Implantation coté composant :
|
|
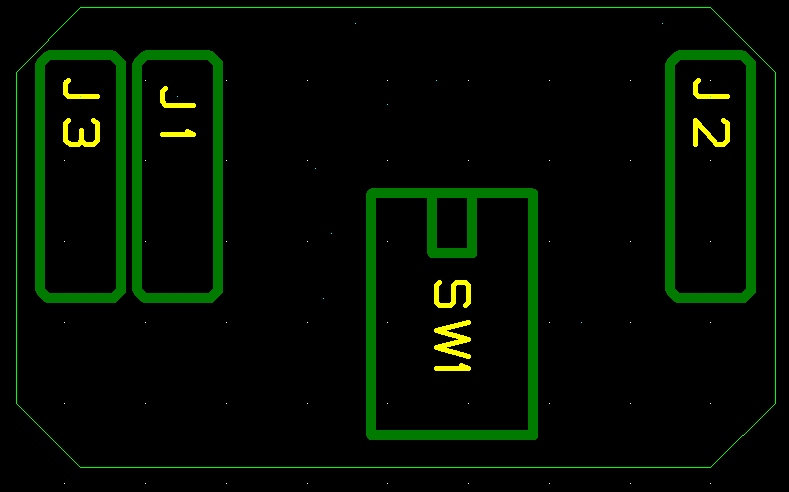
| Implantation coté soudure :
|
Dessin du circuit imprimé coté soudure :
|
Quelques photos du montage terminé :
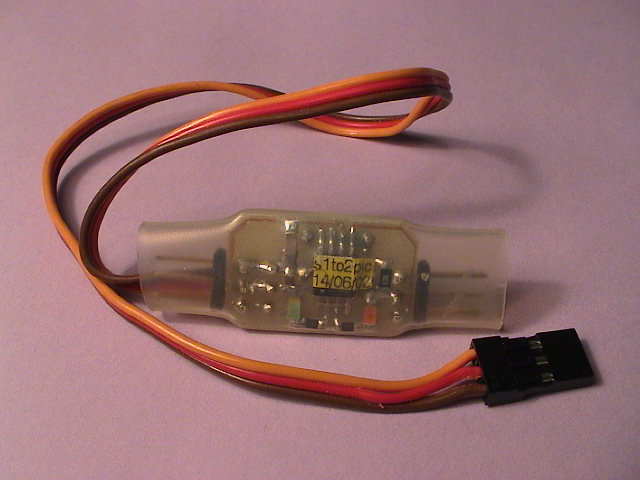
Vous pouvez cliquer sur les images pour les agrandir.
Si vous souhaitez dautres renseignements , vous pouvez me contacter par
Email